


D3PM-1100-P15 Delta Robot
Katangian ng Produkto
Katangian
1、Ang karaniwang cycle time ay mas mababa sa 0.6s, na nakakatugon sa iyong hangarin para sa mataas na bilis at ang pinakamababang volume.
2、Advanced na disenyo ng rotational motor sa paglipat ng plat-form, nagbibigay-daan sa robot na madaling makamit ang mataas na katumpakan ng pag-ikot.
3、Ang robot ay perpekto para sa makitid na mga pagpapatakbo ng espasyo, gayundin sa high-speed at high-precision sa 3C field.Malawakang ginagamit sa pagpupulong, paghawak at pagsubok ng maliliit na piraso ng trabaho.
Mga Parameter ng Produkto
| Uri | D3PM-1100-P15 | |
| Mga palakol | 3+1 | |
| Payload | 15kg | |
| Manipulator | Timbang | 113kg |
| diameter | 1100mm | |
| Pag-uulit | Posisyon | 0.05mm |
| Pag-ikot | 0.025° | |
| Pinakamabilis | 350pp/min | |
| Saklaw ng Pag-ikot | ±360 | |
| Pinahihintulutang Pinakamataas na Sandali ng Inertia | 0.224kg .m2 | |
| Angle Range ng Actuated Arm | pataas | 23.5º |
| Pababa | 70º | |
| Power Supply | Three-Phase 380VAC -10%~+10%, 49~61HZ | |
| Power Capacity | 10KVA | |
| Na-rate na Kapangyarihan | 6.2kw | |
| Temperatura ng Imbakan | -10℃~70℃ | |
| Kapaligiran sa Trabaho | -10℃~50℃,RH≤80% | |
| Proteksyon | IP55 | |
Pagguhit ng Produkto
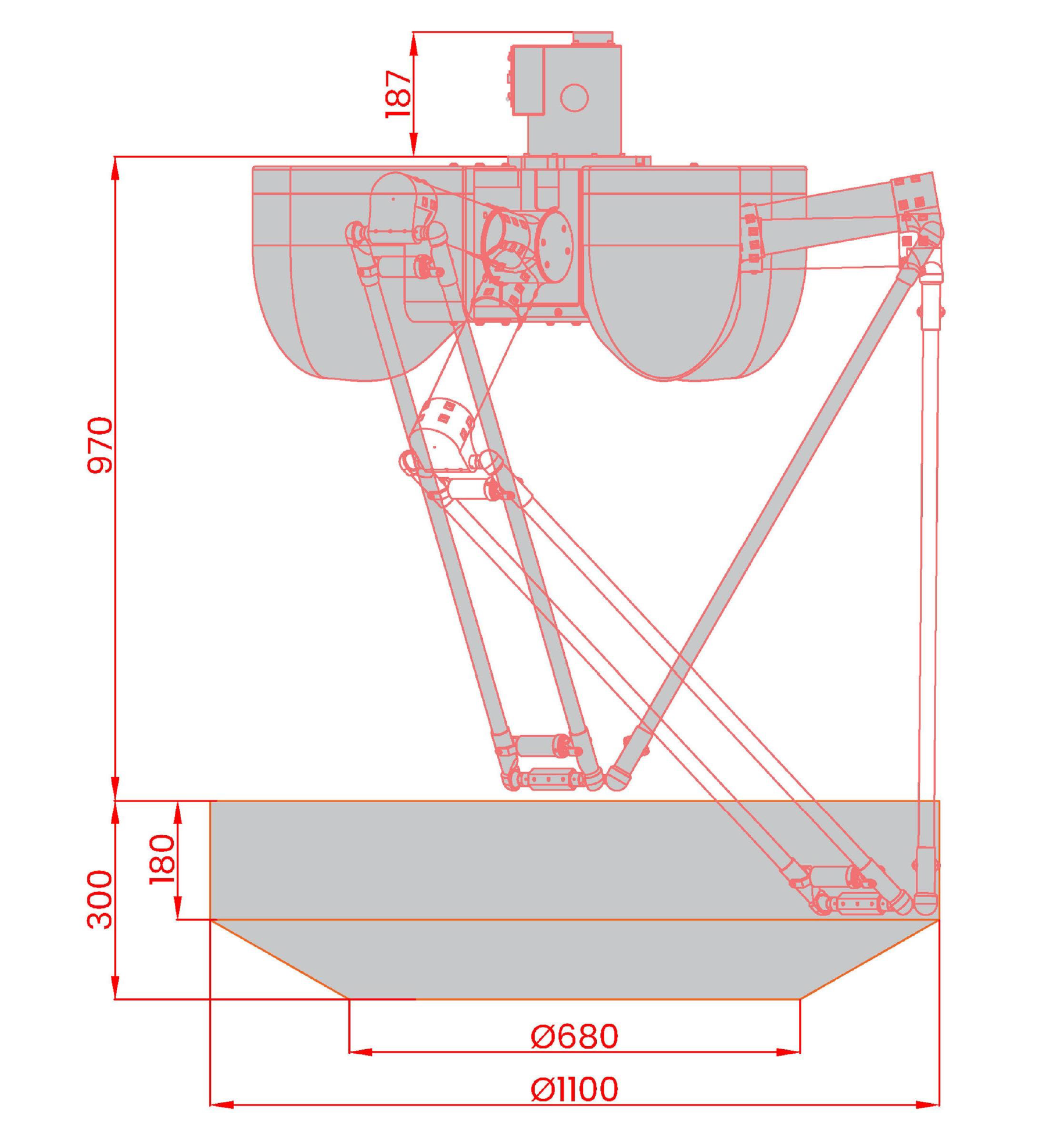
01. Mga Dimensyon at Working range(mm)
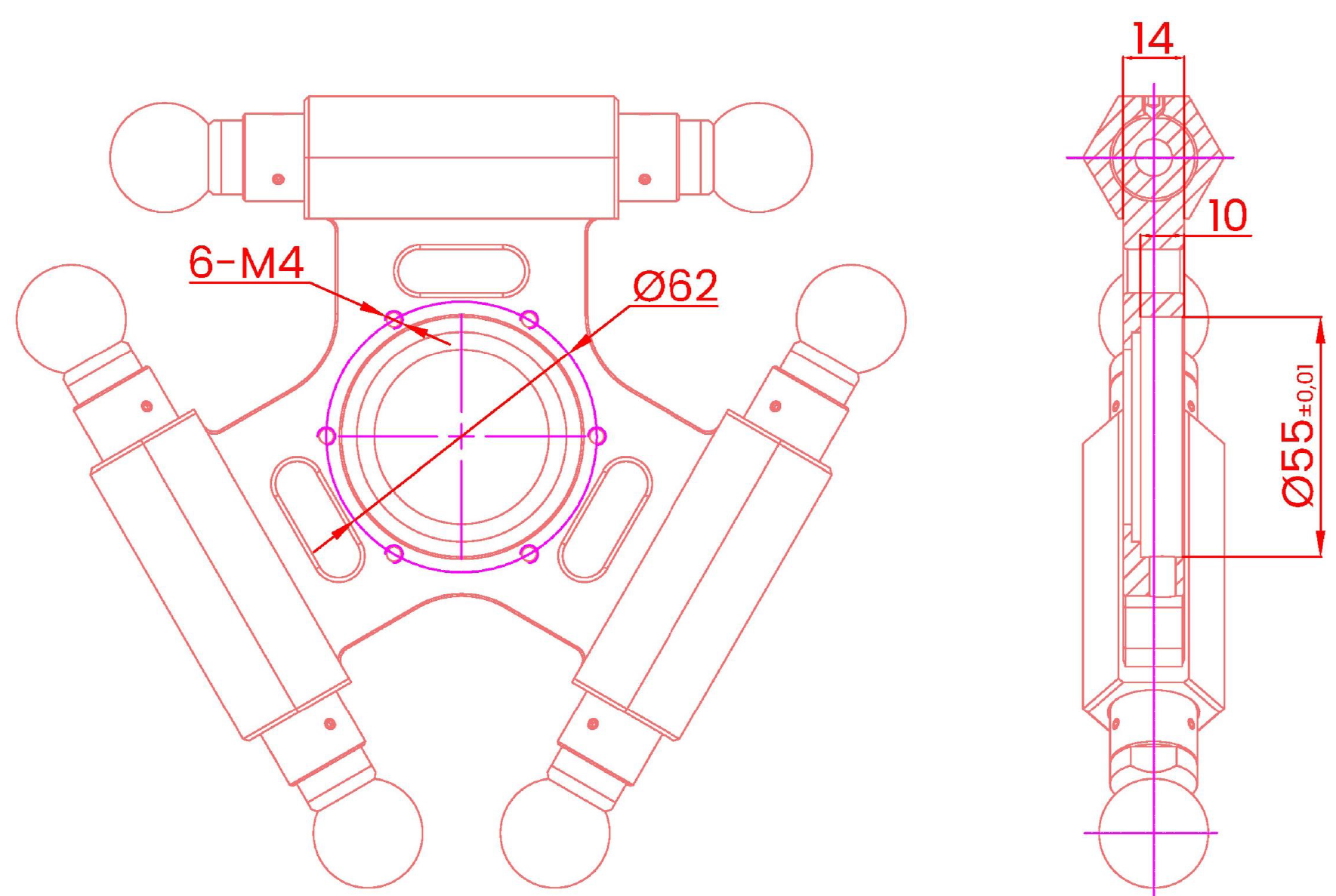
02. Flange(mm)
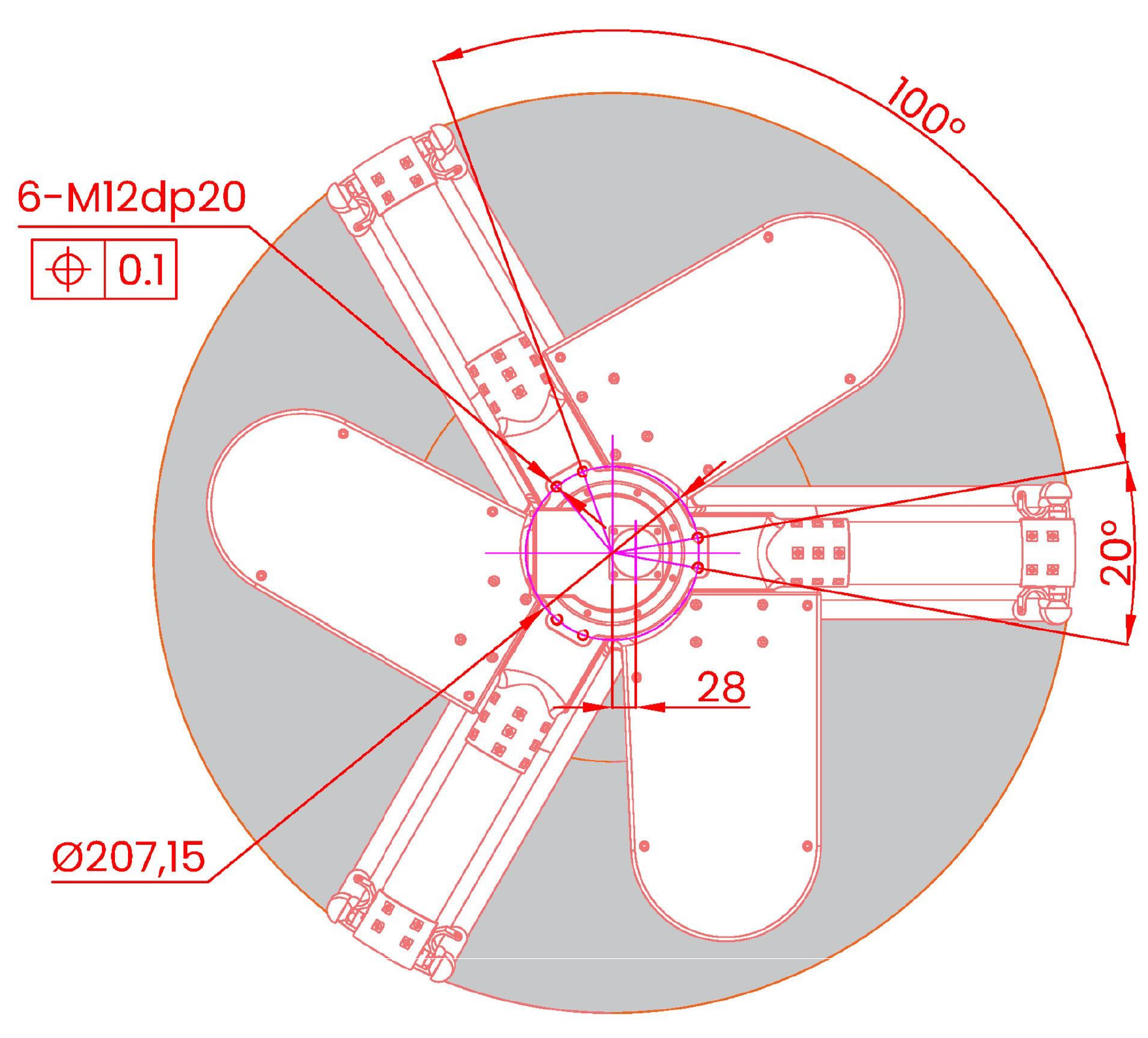
03. Base installation(mm)
Isulat ang iyong mensahe dito at ipadala ito sa amin





